Dan Barlow's Webpage
Arduino Grip Force Sensor Proof of Concept, April 2017, NIMH
Back to Arduino ProgrammingThis project was done for the National Institute of Mental Health.
The research group wanted to quantify a correlation between anxiety and grip force during responses to experiments.
BIOPAC offers a MRI Hand Clench Dynamometer but it is relatively expensive so the group wanted to pilot a study to verify the effect before purchase.
I chose an Arduino MEGA 2560 with a Data Converter and Strain Gauges for the prototype. The interface to the experiment computer was through the parallel port.
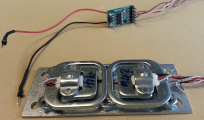



The arduino read the applied force and converted it to a number from 0 to 255 representing the grip strength. The calibration was set by having various PIs and fellows exert their maximum grip.
The binary representation of the grip was presented to the parallel interface.
The experiment computer sampled the data and showed a bar graph representing current grip force for visual feedback to the subject. This display was scaled to the subject's individual maximum grip.
At the same time, the instantantaneous grip force was integrated over time to calculate an effort reading. The subject was prompted to exert more than a specific level of effort to win.
The data export was set to report effort and peak force per trial.
The pilot was sucessful and led to the purchase of two sets of equipment, and the development of at least two approved experiment protocols.
